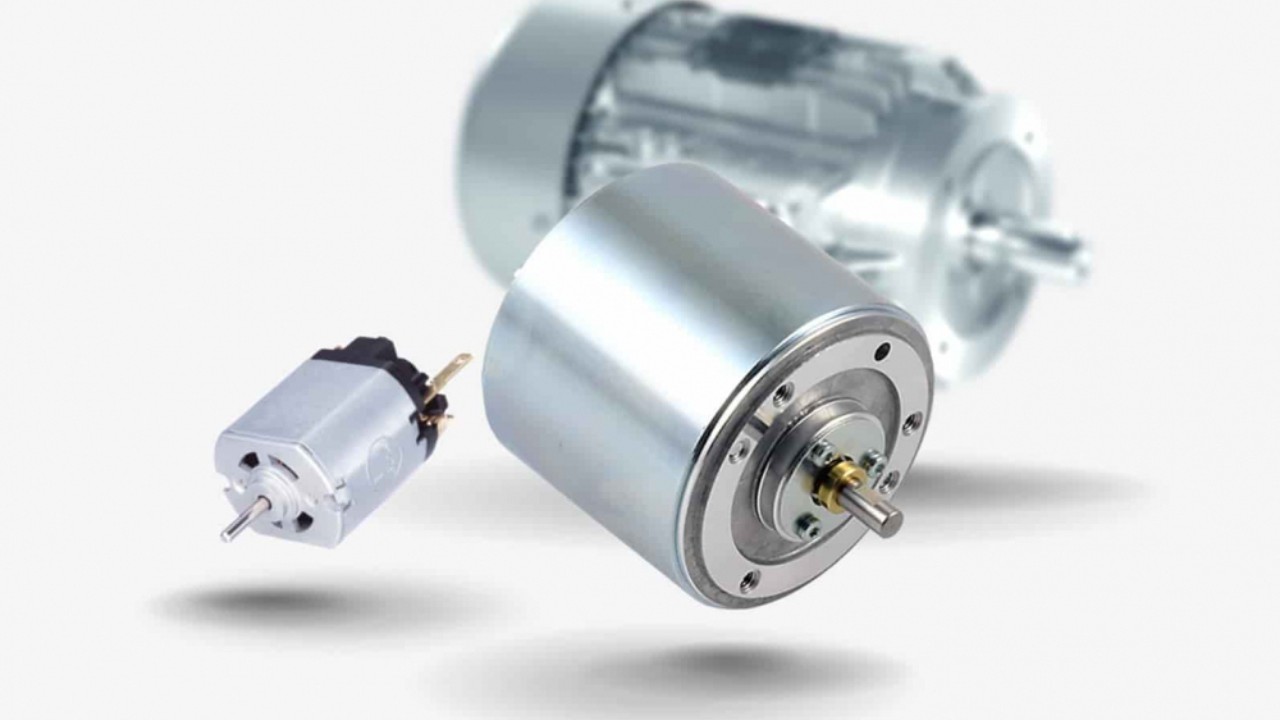
انتخاب موتور DC مناسب برای یک برنامه خاص میتواند یک کار دلهره آور باشد و بسیاری از تولید کننده ها تنها مشخصات اولیه موتور را ارائه می دهند. این مشخصات اولیه ممکن است برای نیازهای شما کافی نباشند. در زیر مشخصات موتور ایده آل ذکر شده است و در صورت امکان راه هایی برای محاسبه تقریبی آن ها آمده است.
مشخصات اولیه و ساختار موتورهای DC
در زیر لیستی از رایجترین مشخصاتی که تولید کننده موتور DC میتواند فراهم آورد؛ آورده شده است. برای اکثر علاقمندان، اطلاعات اولیه برای تصمیم گیری آگاهانه درمورد خرید موتور، کافی است.
ولتاژ نامی
ولتاژ مربوط به بالاترین راندمان موتور است. تلاش کنید منبع تغذیه اصلی را طوری انتخاب کنید که دقیقا مطابق با ولتاژ درایو موتور شما باشد. برای مثال، اگر ولتاژ نامی موتور 6 ولت باشد، میتوانید از یک پک 5x1.2V NiMh برای رسیدن به 6 ولت استفاده کنید. اگر موتور شما در 3.5 ولت نامی کار می کند، شما می توانید از یک پک 3xAA یا پک 3xAAA NiMh ویا یک پک باتری 3.7V LiPo یا Lilon استفاده کنید.
اگر شما موتور را خارج از ولتاژ نامی خود قرار دهید، کارایی موتور کاهش می یابد، اغلب به جریان اضافی نیاز دارد، گرمای بیشتری تولید می کند و طول عمر موتور را کاهش می دهد. علاوه بر ولتاژ نامی، موتور های DC دارای محدوده ولتاژ عمل کننده ای هستند که خارج از آن تولید کنندگان موتور کار کرد موتور را پیشنهاد نمی کنند. برای مثال یک موتور دنده ای 6 ولت DC ممکن است یک محدوده عملیاتی 3-9 ولتی داشته باشد؛ که به کارآمدی 6 ولت کار نمی کند اما با اینحال موتور به خوبی کار می کند.
RPM بدون بار
این به این معنی است که شفت خروجی نهایی چقدر سریع (سرعت زاویه ای) می چرخد با فرض اینکه هیچ چیزی به آن متصل نیست. RMP موتور با ولتاژ ورودی متناسب است. " بدون بار" به این معنی است که موتور بدون هیچگونه مقاومتی است (بدون محور یا چرخی نصب شده در انتهای شفت موتور). معمولا RMP بدون بار با ولتاژ نامی همراه است.
نرخ توان
اگر توان موتور در مشخصات موتور آورده نشده باشد، میتوان بطور تقریبی آن را بدست آورد. توان با جریان و ولتاژ از طریق معادله P=I*V در ارتباط است. از جریان بدون بار و ولتاژ نامی استفاده کنید تا توان خروجی را بطور تقریبی محاسبه کنید. بیشینه توان موتور (که فقط باید برای مدت زمان کوتاهی مورد استفاده قرار بگیرد) میتواند بطور تقریبی با استفاده از جریان (ثابت) stall و ولتاژ نامی محاسبه شود (به حای استفاده از حداکثر ولتاژ).
گشتاور ثابت (stall)
این بیشینه گشتاوری است که یک موتور میتواند با شفتی که دیگر نمیچرخد، فراهم کند. باید به این نکته توجه کنیم که اکثر موتورها اگر بیشتر از چند ثانیه در شرایط stall قرار بگیرند، آسیب های جبران ناپذیری را متحمل می شوند. زمانی که موتوری را انتخاب می کنید باید توجه کنید که آن را بیشتر از تقریبا 3/1 تا 4/1 در گشتاور stall قرار ندهید.
مشخصات کلی
مشخصات کلی موتور های DC معمولا شامل وزن، طول و قطر شفت و هم چنین طول و قطر موتور می شوند. دیگر ابعاد مفید مانند موقعیت سوراخ نصب و نوع چرخدنده است. اگر فقط طول یا قطر ارائه شده است، به یک تصویر ، عکس یا شکل مقیاس دار مراجعه کنید تا تخمینی از از دیگر ابعاد برحسب یک واحد شناخته شده بدست آورید.
گشتاور
گشتاور توسط ضرب یک نیرو (در فاصله ای دور از محور) در فاصله محاسبه می شود. یک موتور که در یک گشتاور stall 10 نیوتن متر قرار دارد میتواند 10 نیوتن را در انتهای 1 متر نگه دارد. بطور مشابه، میتواند 20 نیوتن را در انتهای 0.5 متری نگه دارد و به همین صورت.
مشخصات ایده آل
امروزه بسیاری از تولید کنندگان موتور لیستی از اطلاعات اضافی را فراهم می کنند که میتواند در هنگام انتخاب موتور بسیار مفید باشند. در زیر برخی از اطلاعات اضافی که ممکن است هنگام جستجو برای موتورهای DC با آن ها مواجه شوید آورده شده است:
ولتاژ برحسب RPM
در حالت ایده آل، سازنده ها ممکن است نمودار گرافیکی ولتاژ موتور برحسب rpm را ارائه کنند. برای یک تقریب سریع، ولتاژ نامی و rpm بدون بار و نقطه (0,0) را در نظر بگیرید.
گشتاور برحسب جریان
جریان مقداری است که نمیتواند به آسانی کنترل شود. موتور های DC فقط به اندازه نیازشان جریان استفاده می کنند. مشخصات ایده آل شامل این منحنی می شود، و تقریب ها به آسانی قابل تولید نیستند. گشتاور stall به جریان stall مربوط است. یک موتور که از چرخش آن جلوگیری می شود بیشینه جریان را مصرف میکند و بیشترین گشتاور ممکن را تولید می کند. جریان نیازمند تولید یک گشتاور داده شده بر پایه ی عوامل زیادی شامل ضخامت، نوع و پیکربندی سیم های مورد استفاده برای ساخت موتور، آهن ربا ها و دیگر عوامل مکانیکی است.
مشخصات فنی یا طراحی 3D CAD
بسیاری از سازندگان ربات مایلند که قبل از خرید قطعات، ربات خود را در کامپیوتر بکشند. اگر چه همه سازندگان موتور یک طراحی CAD با ابعاد را دارند، اما به ندرت آن را در دسترس عموم قرار می دهند. ابعاد موتور ایده آل شامل اصول هایی است که در بالا ذکر شد، و همچنین موقعیت های سوراخ نصب و نوع سیم. بطور ایده آل، مواد مورد استفاده برای ساخت موتور، چرخ دنده ها و سیم پیچ ها و نیز ابعاد جداگانه برای موتور و چرخدنده نیز ارائه می شود.
گیربکس (چرخدنده)
تولید کنندگان موتور DC، که همچنین وسایل مربوط به چرخ دنده و سیستم انتقال قدرت را برای موتور تولید می کنند باید نسبت چرخدنده را نیز لیست کنند. در موتورها معمولا چرخ دنده برای افزایش گشتاور و کاهش rpm عمل می کند. مقدار rpm بدون بار داده شده همیشه از آخرین خروجی شفت بعد از چرخدنده است. برای بدست آوردن سرعت زاویه ای شفت موتور قبل از چرخ دنده کافیست مقدار را در نسبت دنده ضرب کنید. برای بدست آوردن گشتاور stall قبل از چرخ دنده باید گشتاور stall را به نسبت دنده تقسیم کنید. مواد مورد استفاده برای ساخت دنده های داخلی معمولا پلاستیک و فلز هستند و طوری انتخاب می شوند که بتوانند بیشینه نرخ گشتاور را تحمل کنند.
تجهیزات جانبی
انکودر نوری از رایج ترین تجهیزات جانبی موتور های دنده ای است. پیدا کردن سایز مناسب انکودر برای موتور شما اگر توسط کارخانه مشابه ساخته نشده باشد بسیار مشکل است. یک انکودر نوری به شما اجازه می دهد تا هر دو جهت چرخش و تعداد دور چرخش موتور را ردیابی کنید. با یک دستور (کد) مناسب یک انکور نوری همچنین میتواند زاویه شفت را نیز به شما بدهد.
نگه دارهنده ها و کوپلینگها
اقلام ثانویه مانند Hubs (برای اتصال خروجی شفت به دیگر اقلام مورد استفاده قرار میگیرد) به شدت برای شفت های با اندازه های مختلف در دسترس قرار میگیرند. تنها تعدادی از تولید کنندگان کوپلینگهای شفت را ارائه می دهند. تصویر زیر سه نوع مختلف از کوپلینگ ها را نشان می دهد.