
اجزاء و قطعات مورد استفاده در ساخت این بازو رباتیک مطابق زیر است :
- 4 سروو موتور کوچک و ساده
- تعدادی پیچ M3
- یک ورق اکریلیک با ابعادی به اندازه کاغذ A4
در ادامه به چگونگی طراحی و ساخت اجزاء مختلف بازو رباتیک با استفاده از قطعات بالا و نیز یک کد بسیار ساده می پردازیم.
قدم اول : جمع آوری قطعات مورد استفاده در بازو رباتیک


قدم اول در ساخت بازو رباتیک، جمع آوری قطعات مورد استفاده در آن است.
همان طور که گفته شد برای ساخت بازو رباتیک نیاز به تهیه 4 سروو موتور است. برای این منظور پیشنهاد می شود از سروو موتورهای نوع 9g استفاده شود.
برای نصب و محکم کردن قطعات و اتصالات به یکدیگر از انواع مختلف پیچ های M3 استفاده می شود که تعداد مورد نیاز هر یک به صورت زیر است:
4 عدد پیچ 20 میلیمتری
2 عدد پیچ 10 میلیمتری
10 عدد پیچ 12 میلیمتری
13 عدد پیچ 8 میلیمتری
11 عدد پیچ 6 میلیمتری
14 مهره
در کنار موتورها و پیچ و مهره ها، مهم ترین بخش در ساخت بازو رباتیک، تهیه و آماده سازی لینک های سازنده آن است.
بهترین راه برای ساخت لینک های سازنده بازو رباتیک، استفاده از خدمات لیزرکات است. برای این کار لازم است ورق آکریلیک را مطابق نقشه های لینک ها با استفاده از خدمات لیزرکات برش دهیم. نقشه تمامی لینک های به کار رفته در بازو رباتیک در پایین آمده است. کافی است آن ها را دانلود کرده و به راحتی با برش لیزر ورق اکریلیک تهیه کنید.
نقشه لینک های به کار رفته در ساخت بازو رباتیک
اگر به خدمات لیزرکات دسترسی ندارید و یا اینکه نمی خواهید وقت خود را صرف آماده سازی این قطعات کنید، صنعت بازار این امکان را برای شما فراهم کرده است تا تمامی اجزاء مورد استفاده در ساخت بازو رباتیک را به صورت یکجا و آماده تهیه کنید و از ساخت آن لذت ببرید.
همین حالا یک کیت بازو رباتیک ارزان قیمت برای خود از صنعت بازار بخرید.
با این حال، چنانچه تنها مشکل شما برش لیزر قطعات بازو رباتیک است هم نگران نباشید! چون صنعت بازار خدمات لیزرکات قطعات بازو رباتیک را به تنهایی نیز برای شما انجام می دهد. کافی است با ما تماس بگیرید.
همچنین در صورت نیاز، سروو موتورهای 9g مورد استفاده در ساخت بازو رباتیک را هم می توانید در اینجا از صنعت بازار تهیه کنید.
قدم دوم : ساخت پایه اصلی بازو رباتیک



پیش از شروع به ساخت بازو رباتیک لازم است تا تمامی اجزاء و قعطات را تهیه کرده باشید و لینک های ربات را نیز لیزرکات کرده باشید. ما در این آموزش از چوب برای ساخت بازو رباتیک استفاده کرده ایم. توجه کنید که استفاده از اکریلیک هم مانند چوب هست و تفاوتی بین این دو در مراحل آماده سازی و ساخت وجود ندارد.
ساخت پایه و بدنه اصلی، بهترین نقطه برای شروع مراحل ساخت بازو رباتیک است.
ابتدا 4 عدد از پیچ های 20 میلیمتری را به همراه 4 مهره بردارید. مطابق شکل های بالا پیچ ها را داخل سوراخ های مشخص شده قرار دهید و مهره ها را تا نیمه پیچ ها بچرخانید اما فعلا آن ها را به صورت کامل سفت نکنید. سپس پایه مربعی شکل را به گونه ای که سوراخ های آن هم تراز با راستای پیچ ها باشند مطابق شکل به پایه اصلی متصل کنید. پس از آنکه از قرارگیری دقیق پایه مربعی مطمئن شدید، مهره ها را تا انتها بچرخانید و به این ترتیب، پیچ ها را به پایه اصلی بازو رباتیک محکم کنید.
قدم سوم : نصب اولین سروو موتور بازو رباتیک!


با آماده شدن پایه اصلی بازو رباتیک، نوبت اتصال اولین سروو موتور است.
روشی که در این قسمت برای اتصال اولین سروو موتور توضیح داده شده است، برای اتصال 3 سروو موتور دیگر هم عینا تکرار می شود. نکته مهم در اتصال سروو موتورها در ساخت بازو رباتیک، استفاده از یک قطعه کمربندی شکل است که با قرار دادن موتور داخل آن، به صورت کامل موتور را در بر می گیرد و این قطعه و موتور کاملا به همدیگر محکم می شوند. اگر به شکل ها دقت کنید، علاوه بر دو سوراخ تعبیه شده بر روی قطعه کمربندی، یک شکاف نیز بر روی آن وجود دارد که برای عبور سیم متصل به انتهای موتور در نظر گرفته شده است. پس از قرارگیری کامل موتور در داخل این قطعه، با استفاده از دو پیج 8 میلیمتری، آن ها را به قطعه مربعی شکلی که در قسمت قبل به پایه اصلی بازو رباتیک وصل کردید، محکم کنید.
قدم چهارم : ساخت بدنه میانی بازو رباتیک



در این مرحله قسمت میانی بدنه بازو رباتیک ساخته می شود. هنگام تهیه سروو موتورها، به همراه آن ها یک قطعه صلیبی شکل و چند پیچ نیز عرضه می شود. در این مرحله، ابتدا قطعه صلیبی شکلی را با استفاده از پیچ ها به قسمت مشخص شده در شکل از بدنه بازو رباتیک متصل کنید.
در مرحله بعد، دو پیچ 12 میلیمتری دیگر را بردارید و مطابق شکل از داخل سوراخ های قطعه میانی بازو رباتیک عبور دهید. دو مهره دیگر نیز به این دو پیچ بی اندازید اما آن ها را به صورت کامل سفت نکنید. دقت کنید که جهت قرارگیری سر پیچ ها و مهره ها کاملا مطابق شکل ها باشد.
دومین قطعه از بدنه میانی بازو رباتیک را مطابق شکل به گونه ای قرار دهید که مهره ها کاملا داخل شکاف های موجود بر روی آن قرار گیرند. دقت کنید که هم تراز بودن مهره ها با شکاف ها و همچنین راست بودن این قطعه در ساخت بازو رباتیک بسیار مهم است. پس از اطمینان از قرارگیری دقیق این قطعه مهره ها را با آرامی و به صورت هم زمان سفت کنید تا این قطعه در جای خود محکم شود.
حال نوبت به اتصال لینک سوم از بدنه میانی بازو رباتیک است. اتصال این لینک به لینک دوم که در شکل به خوبی نشان داده شده است، با استفاده از یک پیچ 6 میلیمتری به آسانی صورت می پذیرد.
قدم پنجم : ساخت شانه سمت چپ بازو رباتیک


در این مرحله، ابتدا دومین سروو موتور را با استفاده از قطعه کمربندی به قطعه مربعی شکل نشان داده شده در شکل از بدنه بازو رباتیک و با استفاده از دو پیچ 8 میلیمتری متصل کنید. سپس بازوی کوچک را مطابق شکل و با استفاده از روشی که پیشتر توضیح داده شد به موتور وصل کنید.
قدم ششم، اتصال شانه سمت چپ بازو رباتیک به بدنه میانی آن



در این گام، باید مجموعه ساخته شده از بازو رباتیک در دو قدم قبل را به یکدیگر متصل کنیم. در قدم چهارم، روش اتصال دو قطعه از بدنه میانی بازو رباتیک به یکدیگر با استفاده از سفت کردن هم زمان پیچ های داخل شکاف تعبیه شده بر روی یکی از قطعات به صورت کامل توضیح داده شد. در این مرحله نیز برای اتصال دو مجموعه ساخته شده در دو قدم قبل، از این روش استفاده می کنیم. با مشاهده تصاویر، چگونگی اتصال این دو مجموعه از بازو رباتیک به یکدیگر و نحوه قرارگیری آن ها در کنار هم به خوبی نشان داده شده است.
برای این منظور ابتدا دو قطعه جدید که در شکل اول نشان داده شده است را در عقب و جلوی بدنه میانی بازو رباتیک (که در قدم چهارم ساخته شد.) قرار می دهیم. سپس مجموعه شانه سمت چپ بازو رباتیک ساخته شده در قدم پنجم را مطابق سومین شکل در کنار آن ها قرار می دهیم. در ادامه، با استفاده از سه پیچ 12 میلیمتری و به روش سفت کردن هم زمان، قطعات جدید قرار داده شده در عقب و جلو بدنه میانی، شانه سمت چپ و بدنه میانی بازو رباتیک را به یکدیگر متصل و محکم می کنیم.
در ادامه قطعات جدید را با استفاده از پیچ های 6 میلیمتری و مطابق شکل ها به مجموعه ساخته شده از بازو رباتیک وصل می کنیم.
قدم هفتم : ساخت بازو رباتیک سمت راست


بازوی سمت راست شامل چند لینک و یک سروو موتور است که باید به بدنه اصلی بازو رباتیک متصل شوند. با توجه به توضیحاتی که در مراحل قبل داده شده است، انتظار ما این است که با نگاه کردن به شکل ها بتوانید اتصلات مربوط به این مرحله را خود شما بدون نیاز به توضیحات انجام دهید. ما که مطمئن هستیم این کار را به راحتی انجام می دهید، کافی است خودتان هم مطمئن باشید!
قدم هشتم : اتصال قطعات باقی مانده از بازو رباتیک


در این قدم سایر قطعات باقی مانده از بازو رباتیک را به بدنه اصلی متصل می کنیم. با نگاه به شکل های بالا، به راحتی و با کمی دقت می توانید این قطعات را به درستی نصب کنید.
تنها نکته ای که در این مرحله لازم است ذکر کنیم، استفاده از دو پیچ 10 میلیمتری جهت اتصال قطعه مثلثی شکل نشان داده شده در شکل ها به انتهای بازوی سمت راست است. همان طور که مشخص است این قطعه مثلثی در دو نقطه با استفاده از پیچ های 10 میلیمتری به بازو رباتیک سمت راست وصل می شود که به آن دقت کنید.
قدم نهم : ساخت گریپر بازو رباتیک





ساخت گریپر، احتمالا سخت ترین مرحله ساخت بازو رباتیک است. این قسمت نیازمند دقت بسیار زیاد است. برای آنکه بتوانید گریپر را به راحتی بسازید، از عکس های بالا استفاده کنید. با دقت در این عکس ها تمامی نکاتی که در ساخت گریپر بازو رباتیک نیاز دارید را می توانید به صورت کامل متوجه شوید.
قدم دهم : اتصال گریپر به بدنه بازو رباتیک



این قدم، آخرین مرحله از ساخت بدنه مکانیکی بازو رباتیک است. برای این منظور، گریپر را با استفاده از یک پیچ 6 میلیمتری مطابق شکل به قطعه مثلتی شکل وصل کنید. همچنین برای اتصال آن به بازوها نیز از پیچ های 8 میلیمتری استفاده نمایید.
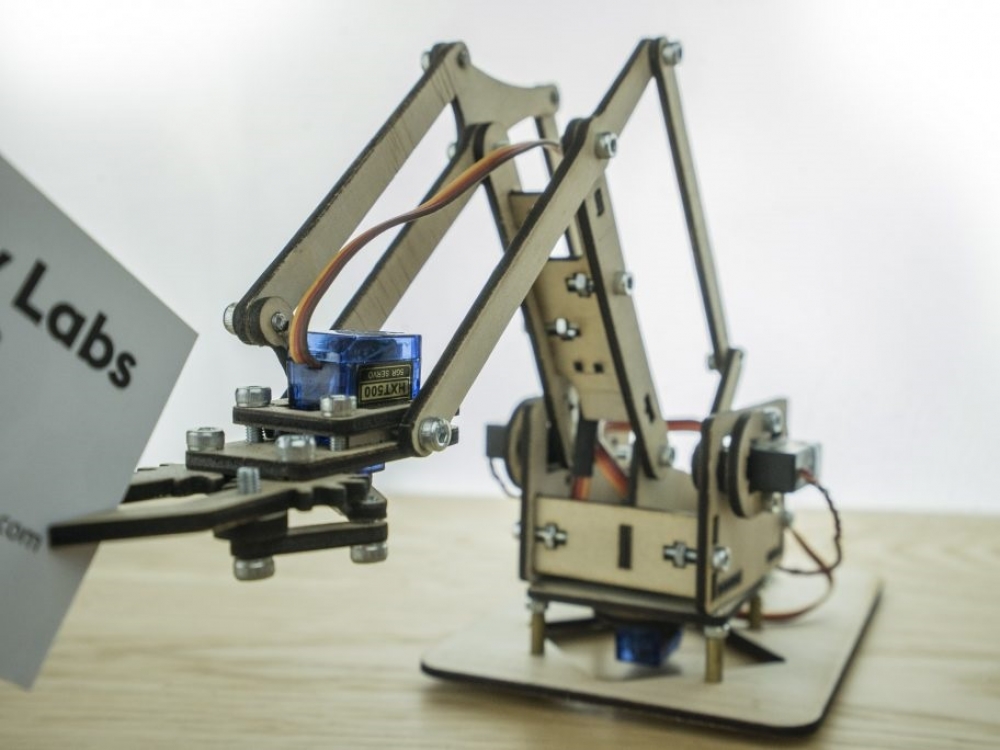
قدم یازدهم : به کنترل بازو رباتیک فکر کنید!

تبریک می گوییم! ساخت بازو رباتیک کامل شده است. تنها لازم است تجهیزات الکترونیک آن نیز نصب شوند. پیشنهاد ما استفاده از یک آردوینو و چهار پتانسیومتر برای کنترل بازو رباتیک است. در لینک زیر می توانید تمامی کدهای لازم برای آپلود بر روی آردوینو را دریافت کنید.
دانلود کدهای آردوینو و راهنمای راه اندازی بازو رباتیک
با استفاده از این کد و راهنمای ارائه شده در این لینک، به راحتی و بدون هیچ مشکلی می توانید بازو رباتیک را راه بی اندازید.
همچنین همکاران ما قبلا در مورد نحوه کدنویسی در آردوینو آموزش های زیادی را بر روی سایت قرار داده اند (اینجا) که می توانید از آن ها نیز استفاده کنید.
اگر در طول مراحل ساخت به مشکل برخوردید می توانید سوالات خود را همین جا بپرسید تا تیم فنی صنعت بازار در سریع ترین زمان ممکن پاسخ شما را بدهند.
حالا زمان آن است که از بازو رباتیک ساخته شده توسط خودتان لذت ببرید !!!!






نظرات (13)